Chengzhen Meng(孟成真)
LINKE. University of Science and Technology of China(USTC)

Xinzhi Building B803
No.100 Fuxing Road,
Hefei, Anhui
Welcome to Chengzhen’s Homepage! 👋
I am a final-year Ph.D. candidate at the University of Science and Technology of China (USTC), supervised by Professor Yanyong Zhang, and expect to graduate in 2026. Before that, I received my Bachelor’s degree in Computer Science and Technology from Northwestern Polytechnical University in 2021. My research interests include mmWave sensing, radar–camera fusion, and UAV tracking.
I’m full of energy and love staying active. Table tennis and badminton are my favorites—I enjoy their fast pace and the fun they bring.
News
| Jul 09, 2025 | Our paper GR-Fall was accepted by UbiComp 2025! 😊 ✨ |
|---|---|
| Jun 22, 2025 | Our paper Ghost Points Matter was accepted by MobiCom 2025! 😊 ✨ |
| Jun 30, 2024 | Our paper CRPlace was accepted by IROS 2024! 😊 ✨ |
| Jun 14, 2024 | Our paper See Through Vehicles was accepted by MobiCom 2024! 😊 ✨ |
| Mar 25, 2024 | Our paper FARFusion was accepted by RA-L 2024! 😊 ✨ |
| Mar 05, 2024 | Our paper mmPlace was accepted by RA-L 2024! 😊 ✨ |
| Jan 29, 2024 | Our paper Calibformer was accepted by ICRA 2024! 😊 ✨ |
| Aug 13, 2023 | Our paper Precise UAV MMW-Vision Positioning was accepted by JSAC 2024! 😊 ✨ |
Publications
- UbiComp 2025
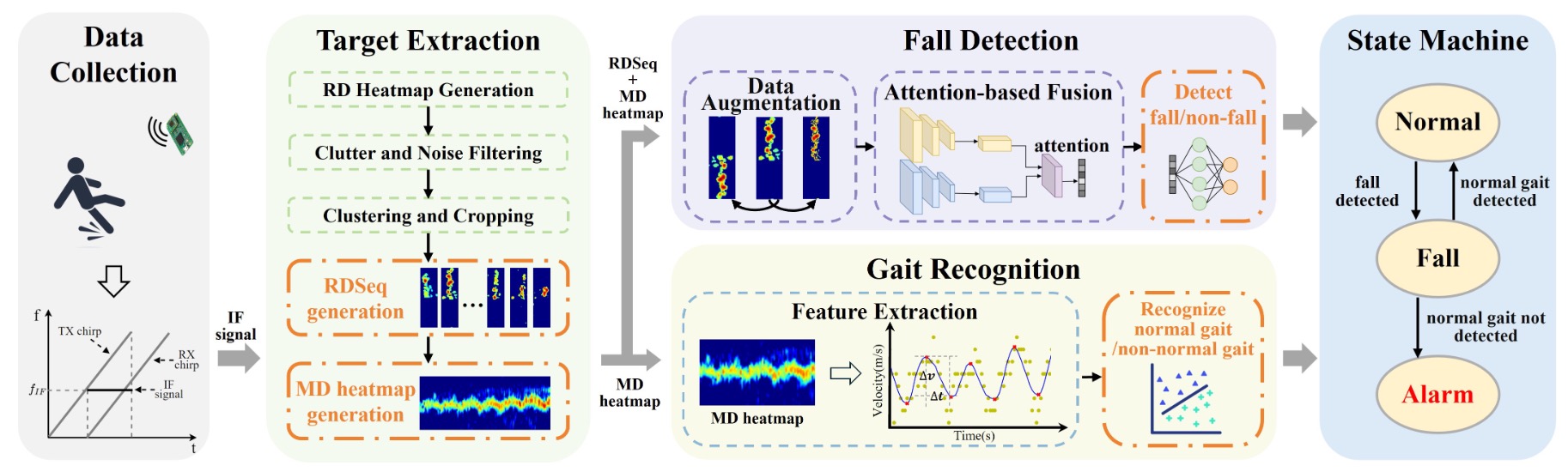 GR-Fall: A Fall Detection System with Gait Recognition for Indoor Environments Using SISO mmWave RadarProceedings of the ACM on Interactive, Mobile, Wearable and Ubiquitous Technologies, 2025
GR-Fall: A Fall Detection System with Gait Recognition for Indoor Environments Using SISO mmWave RadarProceedings of the ACM on Interactive, Mobile, Wearable and Ubiquitous Technologies, 2025 - IROS 2024
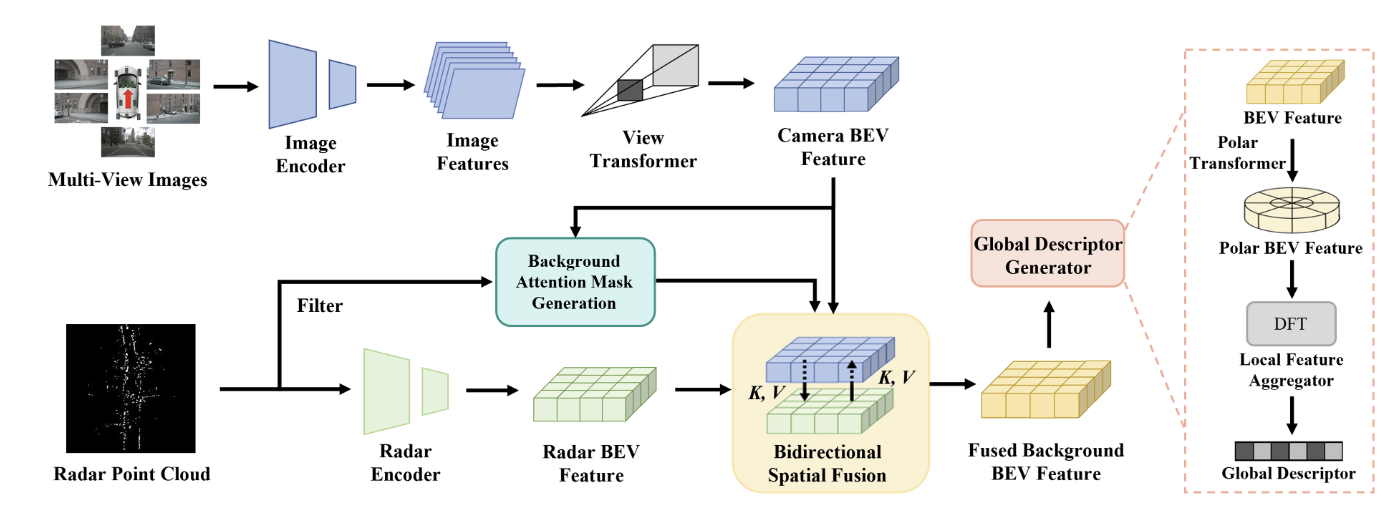 CRPlace: Camera-Radar Fusion with BEV Representation for Place RecognitionIn 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024
CRPlace: Camera-Radar Fusion with BEV Representation for Place RecognitionIn 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024 - MobiCom 2024
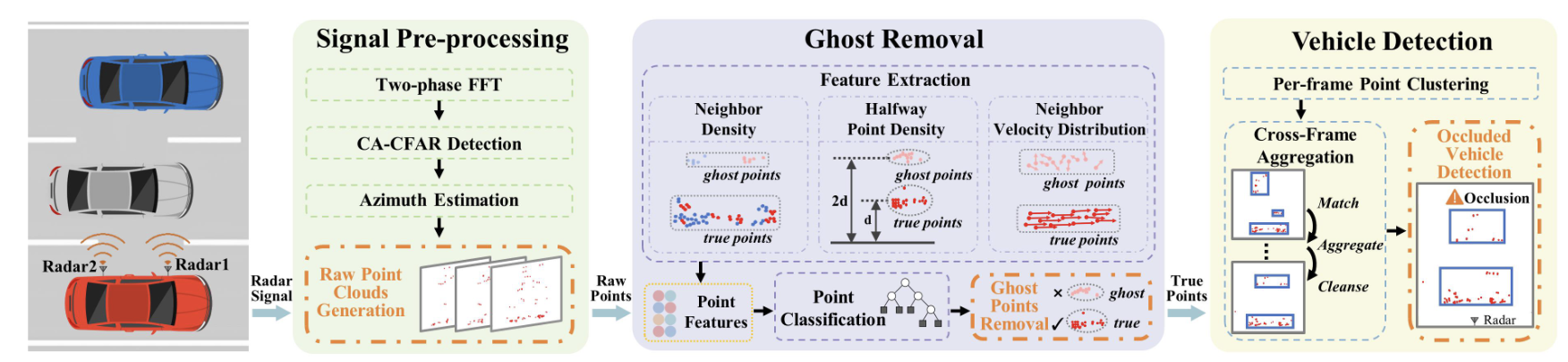 See Through Vehicles: Fully Occluded Vehicle Detection with Millimeter Wave RadarIn Proceedings of the 30th Annual International Conference on Mobile Computing and Networking, Washington D.C., DC, USA, 2024
See Through Vehicles: Fully Occluded Vehicle Detection with Millimeter Wave RadarIn Proceedings of the 30th Annual International Conference on Mobile Computing and Networking, Washington D.C., DC, USA, 2024 - RA-L 2024
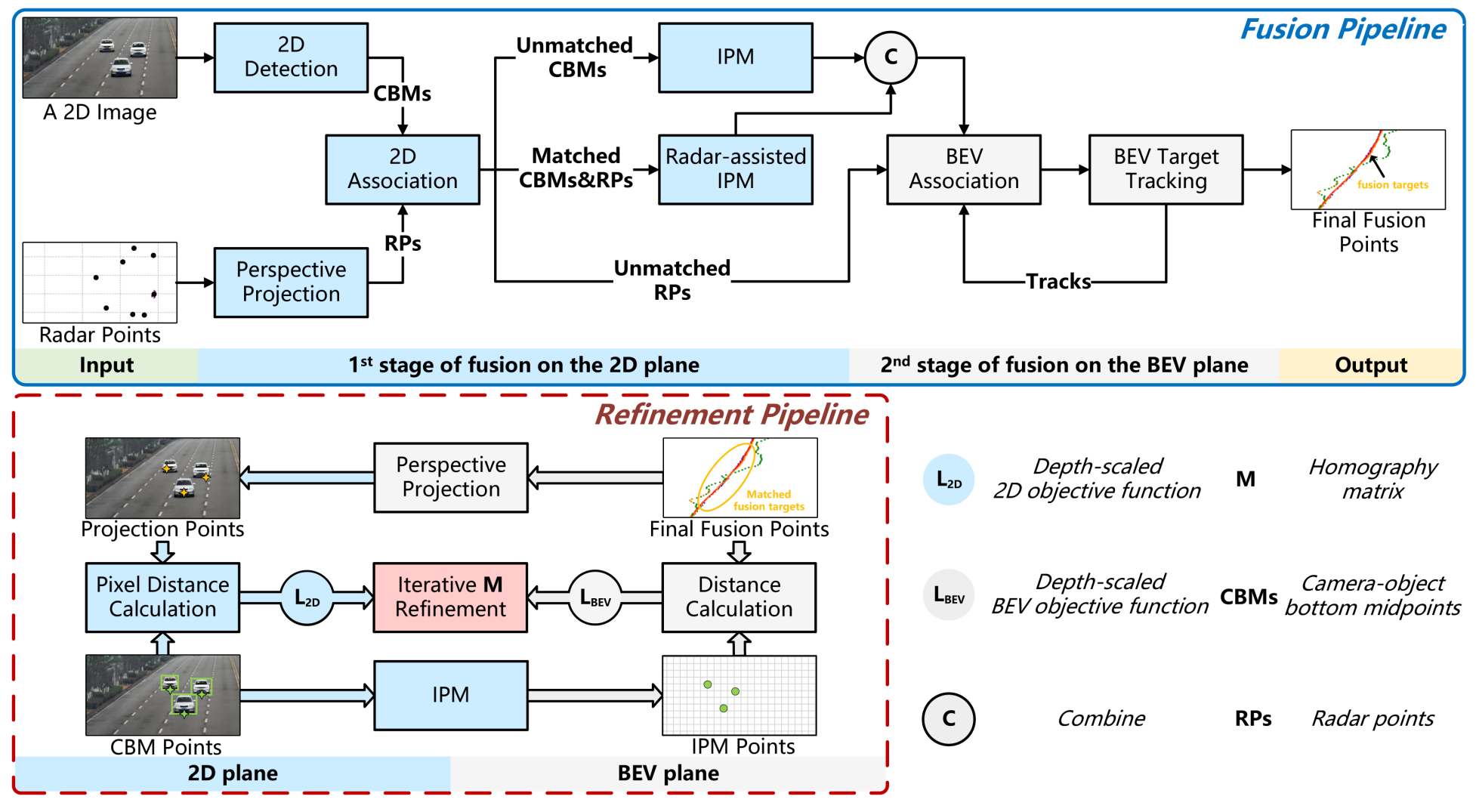 FARFusion: A Practical Roadside Radar-Camera Fusion System for Far-Range PerceptionIEEE Robotics and Automation Letters, 2024
FARFusion: A Practical Roadside Radar-Camera Fusion System for Far-Range PerceptionIEEE Robotics and Automation Letters, 2024 - RA-L 2024
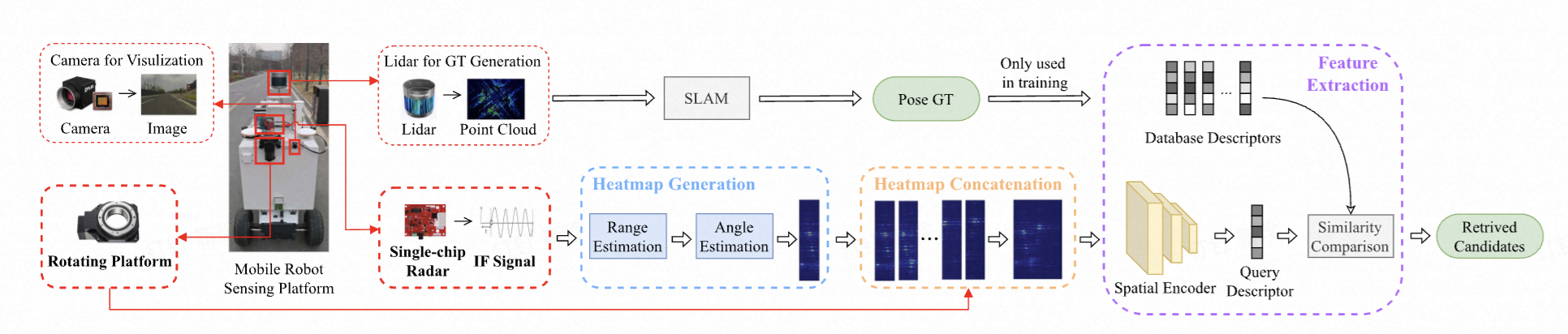 mmPlace: Robust Place Recognition With Intermediate Frequency Signal of Low-Cost Single-Chip Millimeter Wave RadarIEEE Robotics and Automation Letters, 2024
mmPlace: Robust Place Recognition With Intermediate Frequency Signal of Low-Cost Single-Chip Millimeter Wave RadarIEEE Robotics and Automation Letters, 2024 - ICRA 2024
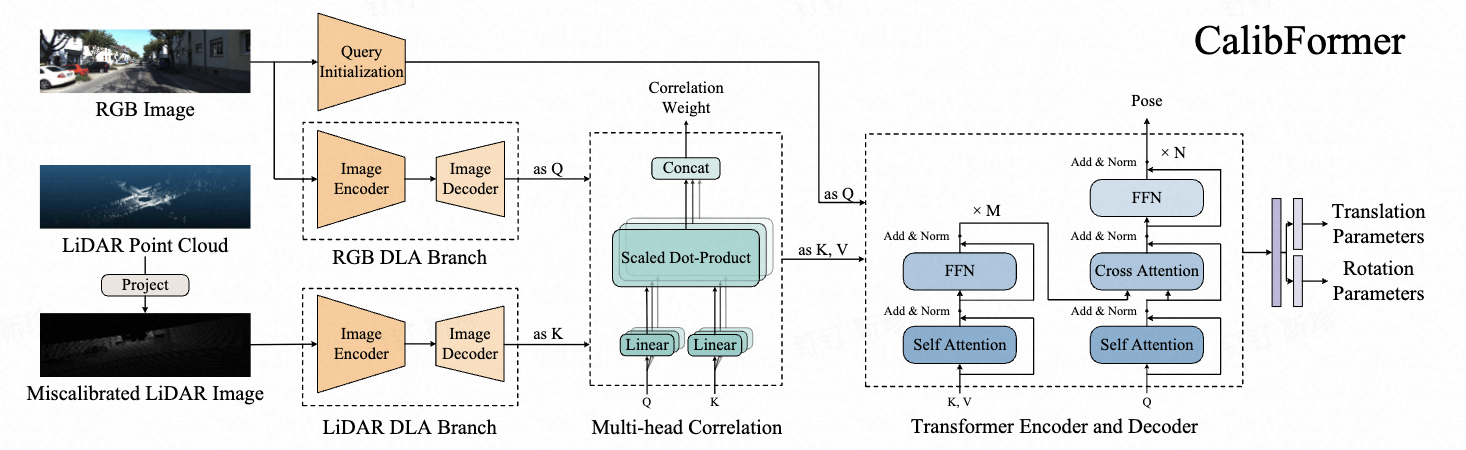 CalibFormer: A Transformer-based Automatic LiDAR-Camera Calibration NetworkIn 2024 IEEE International Conference on Robotics and Automation (ICRA), 2024
CalibFormer: A Transformer-based Automatic LiDAR-Camera Calibration NetworkIn 2024 IEEE International Conference on Robotics and Automation (ICRA), 2024 - JSAC 2024
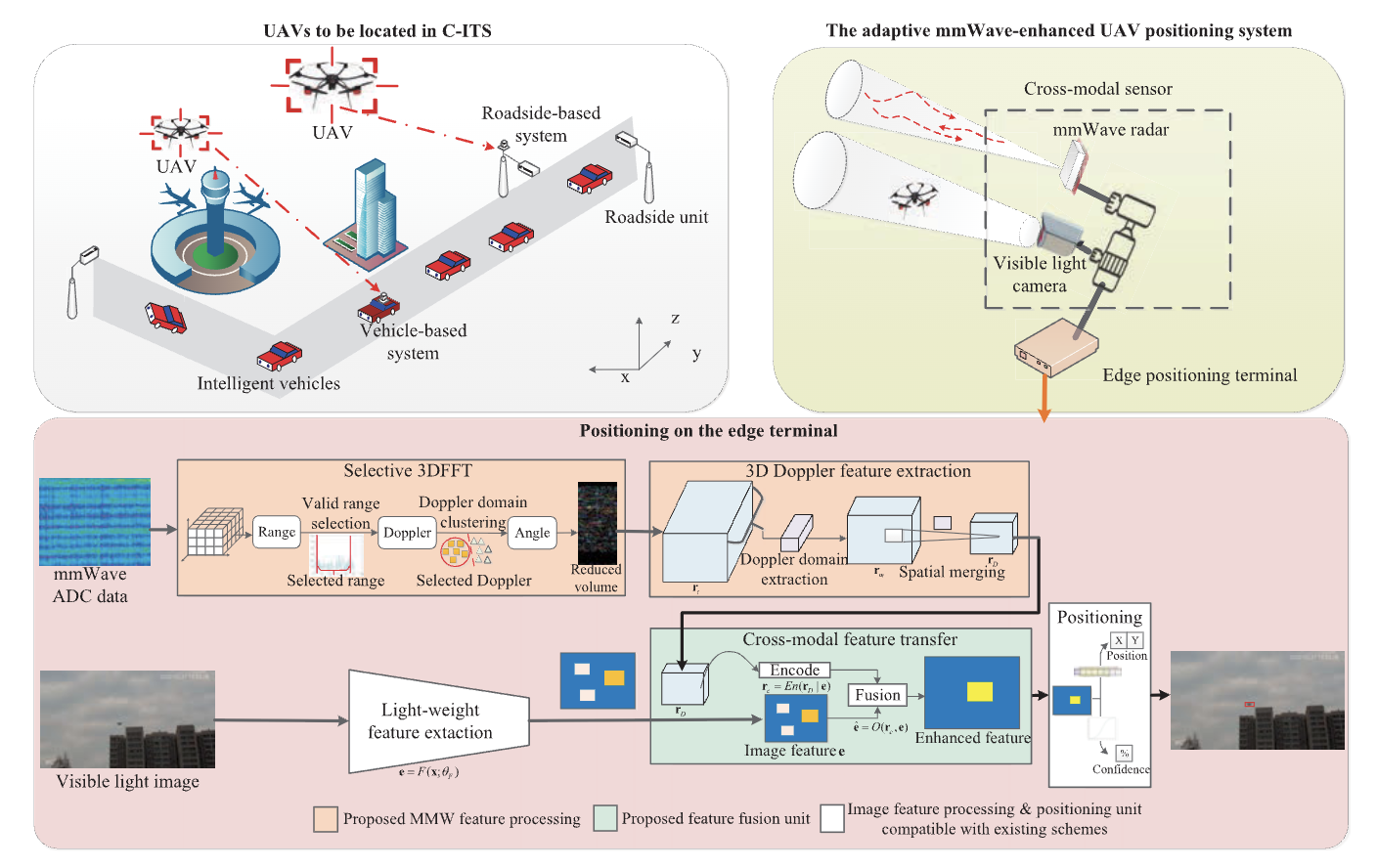 Precise UAV MMW-Vision Positioning: A Modal-Oriented Self-Tuning Fusion FrameworkIEEE Journal on Selected Areas in Communications, 2024
Precise UAV MMW-Vision Positioning: A Modal-Oriented Self-Tuning Fusion FrameworkIEEE Journal on Selected Areas in Communications, 2024